
专业移动式视频监控品牌
移动监控,快速部署

专业移动式视频监控品牌
移动监控,快速部署

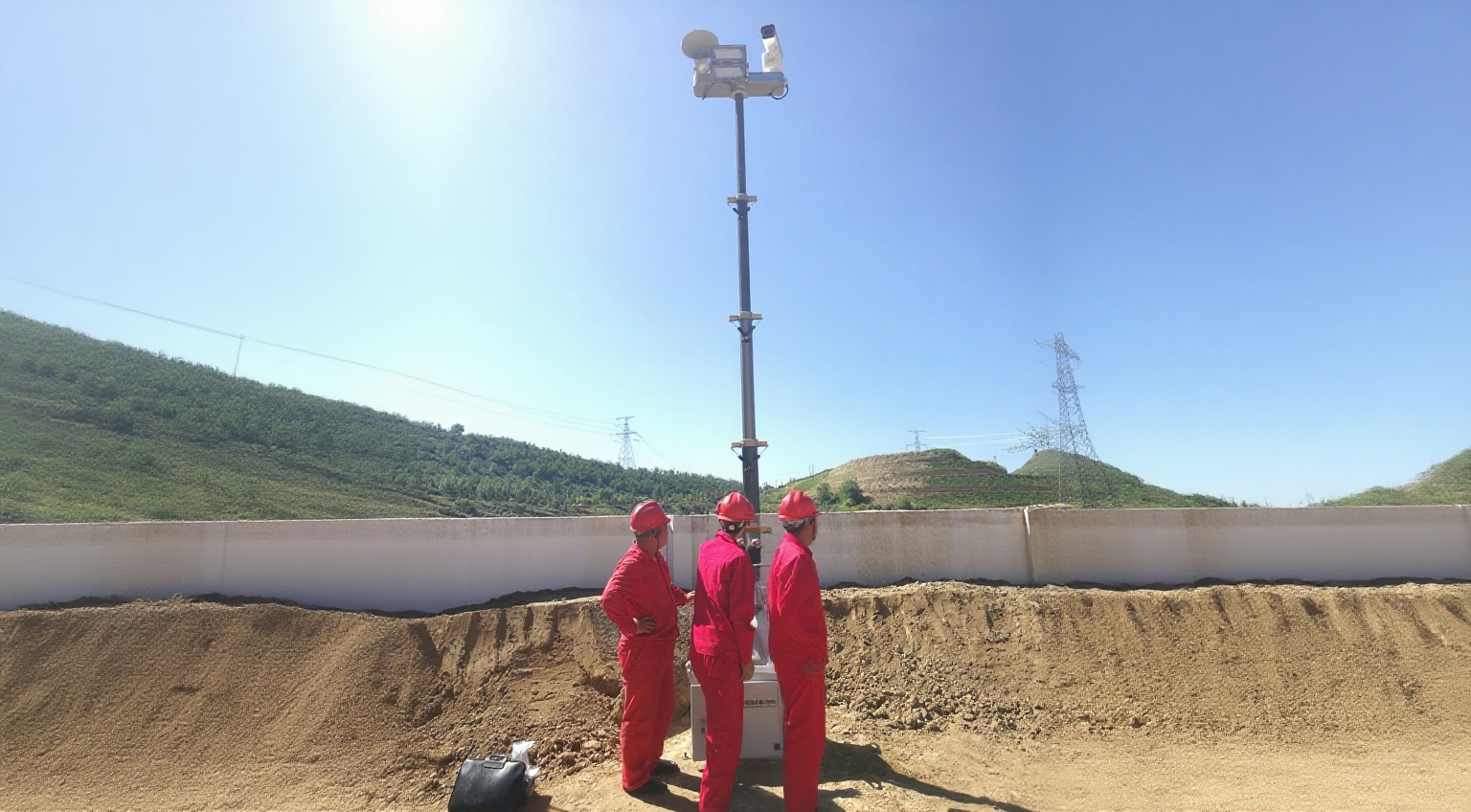
在油气勘探朝着超深井发展的情境之下,传统的人工巡检遭遇到三个方面的挑战。戈壁荒漠之中油井的电力网络不存在,使得监控存在盲区。分散式的作业点处于动态变化的状态,致使固定监控失去效用。在复杂的环境里,比如极端天气、高危作业的时候,人眼识别的精准度不足。中国石油的某个油田引进了友联哨兵移动监控系统,采用可移动、AI智能、无线传输三位一体的方案,构建起全天候的防护网络。
技术攻坚:三大创新解难题
1. 无源监控突破环境限制
采用风光互补供电系统,72小时超长续航
4 G/5G双模传输,荒漠无人区实时回传1080P画面
防爆防腐蚀机身适应-30℃至65℃工况
2. 智能识别替代人眼盯屏
它所配备的是昆仑AI算法模型,能够达成7种风险状况的自动识别。
人员:安全帽/反光衣穿戴检测
设备:抽油机停抽、油管泄漏识别
环境:烟火感知、非法闯入告警
毫秒级响应速度,误报率下降97%(日均告警量2000→50次)
3. 移动布控重构监控逻辑
拖挂式设计支持50km/h快速转场
单人5分钟完成架设,满足爆破、抢修等临时场景需求
升降式云台实现3-6米高度调节,消除储油罐区视觉死角
落地成效:安全与效益双赢
传统模式与智慧监控成效对比表
维度 | 传统模式 | 智慧监控成效 |
响应速度 | 5小时人工复核 | 20秒自动报警 |
违章识别率 | 依赖人员经验 | 92.0% |
成本投入 | 百万级布线成本 | 硬件成本降60.0% |
事故损失 | 年损超千万 | 8个月收回投资 |
典型场景验证:
某钻井平台突发管线泄漏,AI系统2秒锁定坐标,联动声光警报驱离人员,避免重大安全事故
长输管线巡检效率提升3倍,年节省巡检车耗油费用127万元
行业启示:从监控到预防的范式革命
油田方面的安全总监进行表示,这并非是那种简简单单的设备方面的升级情况,这实际上是安全管理逻辑的重新构建状况,系统是通过三阶的进化来推动产生质的变化情况。
感知进化:雷达扫描+热成像构建空间数字孪生
决策进化:报警数据自动生成电子整改单,直达责任人手机端
预防进化:历史违章数据训练风险预测模型,2025年已阻断3起重大隐患

友联哨兵无线高清国网电力双4G智能AI布控球
友联哨兵无线高清国网电力双4G智能AI布控球 黑光原彩 | 红外夜视 友联哨兵移动监控布控球,主要用于视频监控、取证,采用蓄电池为主供电的模式,无线网络传输,启用流程简单,摆脱繁琐的选址操作 ;用户提供高清、流畅、稳定的视频效果,可实现存储、传输、定位、对讲等功能,并支持人脸车牌识别、安全生产行为分析、目标检测AI智能视频算法,实现多智能化管控。整机投入使用,无需拆装,缩短工期;一次性费用投入,多场景反复使用,获得更大投入产出比;根据项目进度更改部署位置,使用更灵活;易于扩展新功能,兼容性更强。
友联哨兵5G智能AI无线高清电网电力布控球
友联哨兵5G智能AI无线高清电网电力布控球 友联哨兵5G智能AI无线高清电网电力布控球,主要用于视频监控、取证,采用蓄电池为主供电的模式,无线网络传输,启用流程简单,摆脱繁琐的选址操作 ;用户提供高清、流畅、稳定的视频效果,可实现存储、传输、定位、对讲等功能,并支持人脸车牌识别、安全生产行为分析、目标检测AI智能视频算法,实现多智能化管控。整机投入使用,无需拆装,缩短工期;一次性费用投入,多场景反复使用,获得更大投入产出比;根据项目进度更改部署位置,使用更灵活;易于扩展新功能,兼容性更强。
全地形智能移动巡检机器人UL-RobotN14
全地形智能移动巡检机器人UL-RobotN14 UL-RobotN14全地形智能移动巡检机器人是一款新一代野外作业机器人,无需人员值守。凭借四轮独立伺服驱动系统与ARM控制架构,四个轮子均可以独立控制速度。支持巡航点设置和绘制功能、轨道点设置功能和轨迹录制功能、激光末端定位功能、激光自动回充功能以及高精度2d地 图建立(包含增量地图功能)等。重新定义了复杂环境下的自主监控标准,其突破性的运动控制系统,配合激光SLAM建图与增量50万平方米以上的地图技术,使设备在油田、农场、工业园区等场景中展现出卓越的适应性。
 深圳市友联华科技有限公司
深圳市友联华科技有限公司 0755-21000395
0755-21000395 marketing@ulinkhua.com
marketing@ulinkhua.com 深圳市龙华区民治街道民康社区1970科技园7栋708-709
深圳市龙华区民治街道民康社区1970科技园7栋708-709
Copyright © 深圳市友联华科技有限公司 2012-2025 All rights reserved 粤ICP备2020100240号 粤公网安备 44030902002464号 技术支持:友联哨兵